2021.06.17 筋電センサー
Dタイプ乾式筋電センサー

3極タイプの筋電センサーを測定対象の筋肉に装着し電源を接続するだけで簡単に筋肉の活動量波形が計測できます。基本的に皮膚への前処理などが不要な乾式表面筋電位センサーであり、超小型・軽量なので動作の邪魔になりません。
Dタイプ乾式筋電センサーは身体の筋活動計測、運動解析、ロボット制御用センサー等への実験・研究用に対応するもので筋電波形信号と筋電波形信号の整流・平滑波形信号の両方を出力します。
基本機能
高性能の同相信号除去回路を内蔵することにより、通常、電源周波数ノイズを軽減する目的で内蔵されるアクティブフィルタを代替すると共に、電源周波数以外の外来ノイズ等の電磁波障害にも耐性があり、皮膚との接触状態が均等でないために起きる信号源インピーダンスの変動があっても筋電信号を確実にピックアップできます。
Dタイプ筋電センサーは筋電波形信号と筋電波形信号の整流・平滑波形信号の両方を出力します。
リファレンス電位信号出力を活用すれば安定した筋電計測が可能になります。
DC3~5Vまたは、DC5~15V仕様の電源電圧で動作しますので、バッテリー電源を使ったユニットに適合します。
使用例
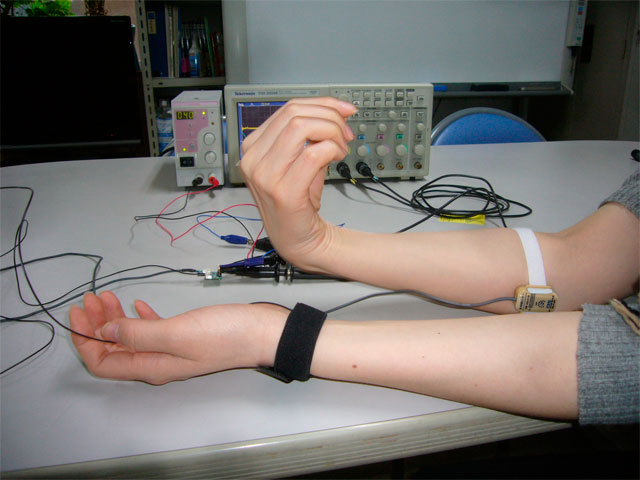
オシロスコープで筋電信号を見る使用例です。腕の筋肉部分に筋電センサーを装着して手首を動かします。左手には筋電電位を安定させるためのリファレンス電極バンドを装着しています。
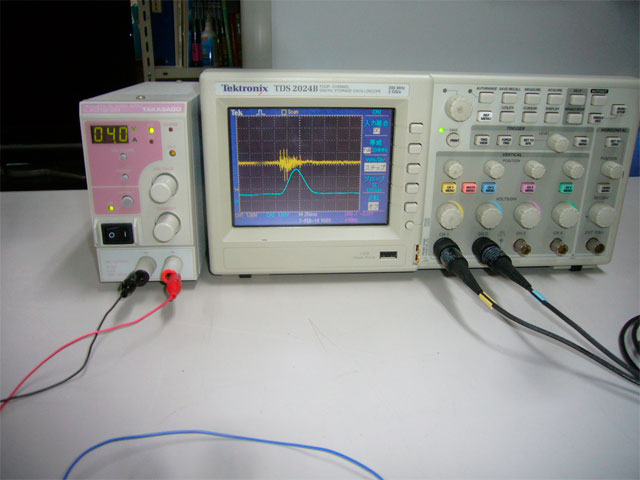
筋電センサーが増幅した筋電電圧をオシロスコープで表示している様子を示しています。黄色が筋電波形信号で、青色が筋電波形信号の整流・平滑波形(積分)信号です。
基本仕様
| 構成品 |
|
| 外形 | 幅30mm×奥行き18mm×高さ8.5mm(突起部除く) |
| 重量 | 約20g(ケーブルを除く) |
| 同相信号除去比 | >94dB |
| 周波数特性(帯域幅) | 8Hz~800Hz |
| 筋電の増幅率(130Hz) | 1300~3800(可変) |
| 整流・平滑筋電の増幅率 | 26000~76000(可変) |
| 整流・平滑筋電の時定数 | 約100msec(固定) |
| 電源電圧(Vs) | DC3~5V or DC5~15V |
| 筋電出力電圧振幅 | 0±Vs /2V(Vs<5V、max5Vp-p) |
| 整流・平滑筋電出力電圧振幅 | 0~Vs V (Vs<5V、max5V) |
| 出力インピーダンス | <100Ω |
| 無負荷時最大電流 | 約6.5mA(Vs=5V) |
| 1KΩ負荷時最大電流 | 約14mA(Vs=5V) |
| リファレンス電位信号出力 | 有 |
| ケーブル | 標準長1.5m 指定長2.0m、2.5m、3.0mで対応 |
| センサー信号出力コネクタ | GHコネクタ(GHR-05V-S) |
| 保護構造 | 防滴 |
ケーブル芯線アサイン
| 芯線色 | 対応信号名 | 信号レベル(V) | コネクタ品番号 |
| 黄色線Vs | 電源電圧(Vs) | 3~5 or 5~15 | 1 |
| 緑色線 | 筋電信号(ME) | 0±Vs /2V(Vs<5V、max5Vp-p) | 2 |
| シールド線 | 電源準電圧(GND) | 0 | 3 |
| 青色線 | リファレンス電位信号(REF) | 0~Vs (Vs<5V、max5V) | 4 |
| 白色線 | 整流・平滑筋電信号(SME) | 0~Vs (Vs<5V、max5V) | 5 |
構成品
乾式筋電センサー本体

乾式筋電センサー本体です。測定対象筋肉に装着し、簡単に筋肉の活動波形が計測できます。
マジックハンドストラップ

乾式筋電センサーの装着に使用します。
調整用ドライバー

乾式筋電センサーの調整に使用します。
オプション品

接続基板

接続基板は、乾式筋電センサーのケーブル先端に接続されているコネクタ(GHR-05V-S)とリファレンス電極バンドのケーブル先端に接続されているコネクタ(HJ-3)を接続可能とするプリント基板です。また、5Pヘッダー(CN3)およびスルーホール(JN1、JN2)より乾式筋電センサーへの電源供給、筋電出力信号の中継が可能です。
筋電信号観察方法
- 電源基準(シールド)線を(-)側に、電源(黄色)線を(+)側にして電源を接続します。
- 電源基準(シールド)線を基準として筋電信号(緑色)線と整流・平滑筋電信号(白色)線をオシロスコープに接続して信号波形を観察できるようにします。また。リファレンス電位信号(青色)線をオシロスコープに接続するとリファレンス電位信号波形を観察することができます。
- リファレンス電位信号(REF)をオプションのレファレンス電極バンド等を使って肘等の筋肉のない部位の皮膚に接触させれば安定した状態で信号波形を観察できます。
- ウェットティッシュなどで測定対象の筋肉を湿らすなどの前処理を行うことにより安定した状態で観察できます。
- 筋電センサーに付属品のマジックバンドストラップを取付け、測定対象の筋肉に装着して筋肉を弛緩させた状態で電源を供給します。
- 電源を供給した直後や筋電センサーの装着位置を変更した場合、筋電センサーは自動的に電極と皮膚との接触状態のアンバランスを補正します。この間、リファレンス電位信号(REF)出力と筋電信号(ME)出力は電源電圧近くの振幅で振れ、また、整流・平滑筋電信号(SME)出力は電源電圧レベルに貼り付きますが、暫くするとリファレンス電位信号(REF)と筋電信号(ME)の振幅は小さくなり、整流・平滑筋電信号(SME)は電源基準電圧(GND)レベル近くまで低下します。
- 筋電センサーの自動アンバランス補正中に測定対象の筋肉を収縮・弛緩させると補正時間を短縮できる場合があります。
- 筋電センサーの自動アンバランス補正が終了し整流・平滑筋電信号(SME)が電源基準電圧(GND)レベル近くまで低下した状態で測定対象の筋肉を収縮・弛緩させるとオシロスコープ上の筋電信号波形と整流・平滑筋電信号波形が変化する様子が観察できます。
- 筋電センサーの3極を導電テープなどで短絡するとリファレンス電位信号(REF)と筋電信号(ME)の振幅はゼロになり、整流・平滑筋電信号(SME)は電源基準電圧(GND)レベルになります。